France – Brest – 28/11/2016 – La thèse d’Emanuel Pablo Vega soutenue le 20 octobre 2016 en co-encadrement UBO-ENIB propose un travail de recherche sur l’optimisation de la propulsion et de la commande des véhicules autonomes sous-marins AUV (Autonomous Underwater Vehicles). Un travail de recherche qui permettra une observation suivie des parcs d’éoliennes flottantes et naturellement des hydroliennes.
Ce projet s’interface à la thématique diagnostic et a pour principal objectif de développer de nouvelles technologies en robotique sous-marine pour réaliser les futures missions de maintenance des systèmes de récupérations des Energies Marines Renouvelables (EMR).
Les robots sous-marins autonomes (AUV) ne sont pas capables d’assurer aujourd’hui l’inspection, la maintenance ou la réparation de systèmes immergés à faible profondeur (0 à 50m). En effet, cela nécessite des capacités de manœuvres encore non accessibles à ces engins (environnent encombré, courants et vagues).
L’objectif du projet RSM propose d’améliorer leurs capacités de manœuvre à l’aide de nouvelles technologies de propulsion. Ceci leur permettra de réaliser des tâches complexes comme la maintenance in situ (à faible coût) d’installations offshore (éoliennes ou barges houlomotrices) ou sous-marines (hydroliennes).
Les travaux précédents et en cours au LBMS-ENIB avaient permis de démontrer la faisabilité et l’intérêt de la propulsion vectorielle pour les missions complexes affectées aux AUVs. Cependant, d’autres travaux devaient être menés afin d’étudier les différentes technologiques permettant d’accéder à ce type de propulsion, de les contrôler et d’en exploiter les capacités. La problématique scientifique consiste à atteindre la propulsion vectorielle en opérant une reconfiguration du système propulsif de l’AUV. Cette reconfiguration permet d’envisager plusieurs modes de propulsion, pouvant s’adapter à différents besoins propulsifs que peut rencontrer le robot dans sa mission de maintenance. Le robot peut avoir besoin de parcourir de longues distances, sans avoir besoin de beaucoup manœuvrer (recherche et approche du système EMR), puis de se maintenir à un point fixe pour une inspection générale malgré les courants et les vagues (positionnement dynamique), ou de parcourir une partie du système avec une vitesse/force contrôlée (nettoyage d’une pâle ou inspection de détails). Une technologie de propulsion vectorielle s’appuyant sur l’utilisation de propulseurs magnétiques reconfigurables (PMCR) a été validée au laboratoire. D’autres solutions sont envisagées, incluant une synergie de propulsion entre actionneurs (gouvernes et propulseurs) et une loi de commande basée sur les modèles électromécaniques du robot.
L’objectif de la thèse était de déterminer la meilleure combinaison possible entre actionneurs (topologie propulsive), système de contrôle et stratégie de commande pour une mission de maintenance EMR, selon des critères scientifiques et techniques rationnels.
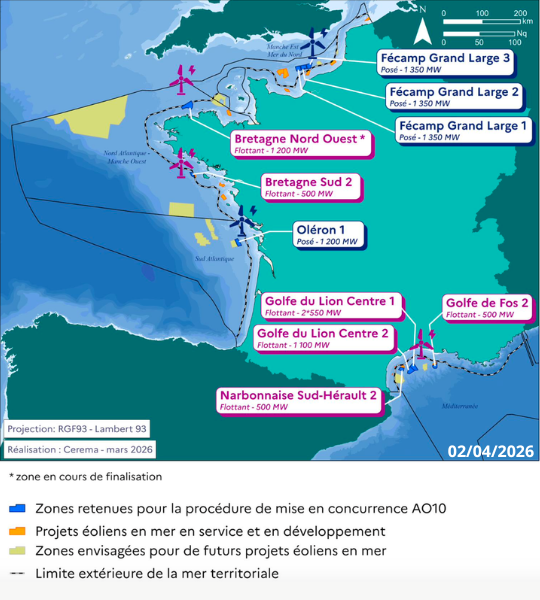
Ce type de véhicule autonome sera particulièrement utile pour la surveillance et la maintenance des hydroliennes, les éoliennes flottantes lors de tests dans les fermes pilotes et bien évidemment dans les futures fermes commerciales.
Le modèle hydrodynamique de l’AUV est examiné.
Son système de propulsion est étudié et des modèles pour des solutions de propulsion différentes (fixe et vectorielle) sont développés dans le cadre de la mobilité autonome. Le modèle et l’identification de la technologie de propulsion dite fixe sont basés sur un propulseur disponible commercialement.
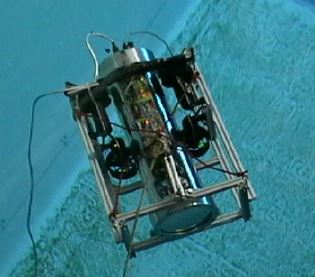
Le système de propulsion vectoriel est basé sur un prototype de propulseur développé à l’IRDL-ENIB https://www.enib.fr/fr/recherche/laboratoires-valorisation-innovation/laboratoires.
Une méthode de commande non linéaire utilisant le modèle hydrodynamique de l’AUV est développée et son adaptation à deux systèmes de propulsion est présentée. Des analyses portant sur la commandabilité du robot et l’application de cette commande à différents systèmes sont proposées.
L’optimisation globale est utilisée pour trouver des topologies propulsives et des paramètres de commande adaptée à la réalisation de tâches robotiques spécifiques. L’optimisation réalisée permet de trouver des solutions capables d’assurer le suivi de trajectoire et de minimiser la consommation énergétique du robot. L’optimisation utilise un algorithme génétique (algorithme évolutionnaire), une méthode d’optimisation stochastique appliquée ici à la conception orientée tâche de l’AUV.
Les résultats de cette optimisation peuvent être utilisées comme une étape préliminaire dans la conception des AUVs, afin de donner des pistes pour améliorer les capacités de la propulsion. La technique d’optimisation est également appliquée au robot RSM (fabriqué au sein de l’IRDL-ENIB) en modifiant seulement quelques paramètres de sa topologie propulsive. Cela afin d’obtenir des configurations de propulsion adaptées au cours d’une seule et même mission aux spécificités locomotrices des tâches rencontrées : Reconfiguration dynamique de la propulsion de l’AUV.
Les enjeux industriels sont par exemple de produire moins cher, de réduire les consommations énergétiques et l’empreinte environnementale, tout en restant résistant.
Au sein de l’IRDL, les chercheurs de l’ENIB travaillent sur l’analyse et la prédiction de la durée de vie des structures mécaniques et plus particulièrement sur la fatigue et le choc. Les comportements des matériaux, des assemblages et des systèmes, sont étudiés et modélisés en tenant compte de l’environnement (contraintes spécifiques du milieu marin par exemple) et du cycle de vie. La grande majorité des projets de recherche sont motivés par des défis issus du monde industriel, dans de nombreux domaines d’application : l’automobile, l’aéronautique, le médical mais aussi le naval et les EMR …
Les enseignants-chercheurs de l’ENIB mènent leurs travaux de recherche au sein du pôle thématique durabilité et diagnostique (publications ENIB).
https://www.enib.fr/fr/recherche/laboratoires-valorisation-innovation/laboratoires
Technopôle Brest-Iroise
La thèse d’Emanuel Pablo Vega est téléchargeable sur le site ouvert HAL https://tel.archives-ouvertes.fr/tel-01442037v2/document
Le jury était composé de : Philippe BIDAUD Professeur, Université Pierre et Marie Curie / rapporteur Frédéric BOYER Professeur, Ecole des Mines de Nantes / rapporteur Frédéric CHAPELLE Maître de Conférences, SIGMA Clermont /
examinateurs Vincent HUGEL Professeur, Université de Toulon / Luc JAULIN Professeur, ENSTA Bretagne.
Président Janito VAQUEIRO FERREIRA Professor, University of Campinas, Brazil / co-encadrant Mohamed BENBOUZID Professeur, Université de Bretagne Occidentale / directeur de thèse et co-encadrant avec Olivier CHOCRON Maître de Conférence, ENI Brest.
Soutenance de thèse d’Emanuel Pablo VEGA « Systèmes énergétiques et Procédés thermique »
« Task-Design and Optimization of Reconfigurable Propulsion Systems for Autonomous Underwater Vehicles »
Keywords :
Marine robotics, underactuated robots, underwater vehicle dynamics, propulsion, robot control, design optimization, genetic algorithms, magnetic coupling
Abstract :
In this PhD thesis, the optimization of the propulsion and control of AUVs is developed. The hydrodynamic model of the AUVs is examined. Additionally, AUV propulsion topologies are studied and models for fixed and vectorial technology are developed. The fixed technology model is based on an off the shelf device, while the modeled vectorial propulsive system is based on a magnetic coupling thruster prototype developed in IRDL (Institut de Recherche Dupuy de Lôme) at ENI Brest. A control method using the hydrodynamic model is studied, its adaptation to two AUV topologies is presented and considerations about its applicability will be discussed. The optimization is used to find suitable propulsive topologies and control parameters in order to execute given robotic tasks, speeding up the convergence and minimizing the energy consumption. This is done using a genetic algorithm, which is a stochastic optimization method used for task-based design. The results of the optimization can be used as a preliminary stage in the design process of an AUV, giving ideas for enhanced propulsive configurations. The optimization technique is also applied to an IRDL existing robot, modifying only some of the propulsive topology parameters in order to readily adapt it to different tasks, making the AUV dynamically reconfigurable.
L’IRDL : Institut de Recherche Dupuy de Lôme, Formation de Recherche en Évolution (FRE CNRS 3744)
L’IRDL réunit 280 membres, dont 110 doctorants, 4 plate-formes technologiques et de nombreuses collaborations industrielles. L’IRDL a pour ambition de répondre aux défis scientifiques et technologiques liés à l’ingénierie des matériaux, de la mécanique et des systèmes.
Les applications visent principalement les domaines de la mer, du transport (automobile, aéronautique) et de la défense.
Publicités Google :